ROBOTICS / COMPUTER VISION
JERRY
An autonomous robotics project focused on computer vision, object detection, depth estimation, and robotic arm control for autonomous trash pickup and manipulation.
Demo
4-DOF robotic arm w/ gripper
1 / 2
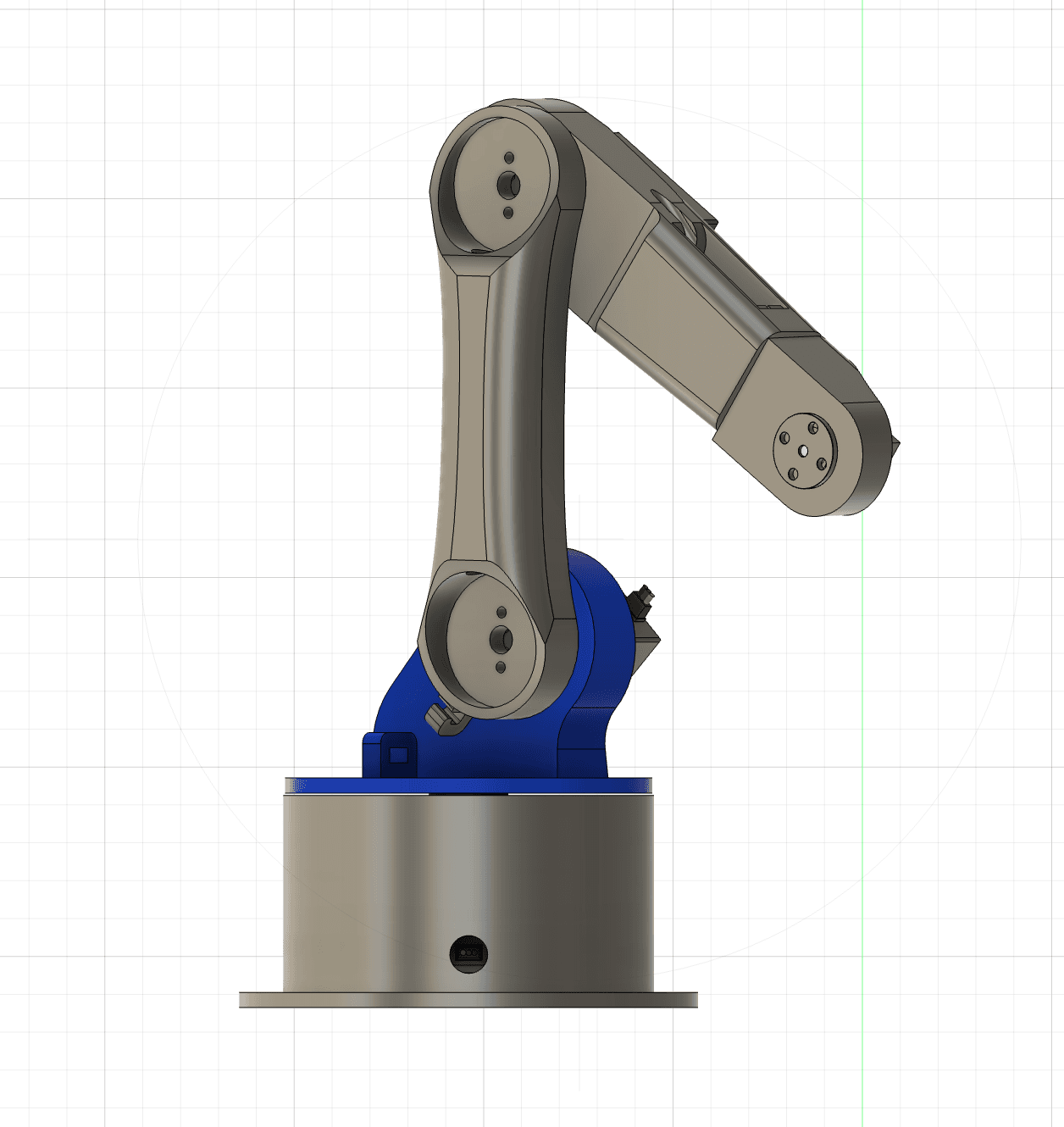
4-DOF robotic arm engineered for object positioning, rotation, and autonomous manipulation tasks.
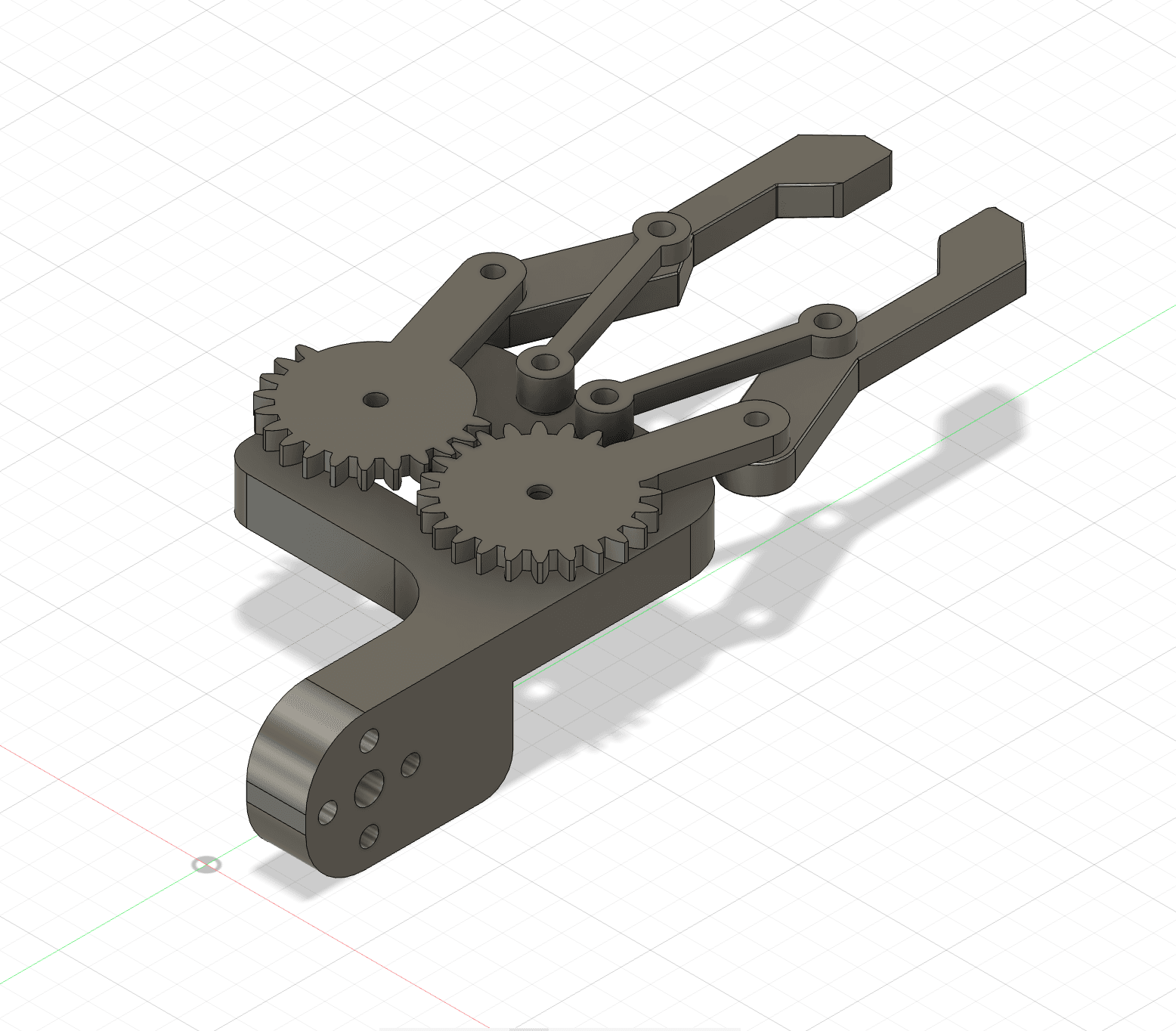
Gripper system designed for lightweight object grasping and built to be used with the robotic arm's movement pipeline.
What It Does
JERRY scans nearby surroundings using computer vision systems to identify trash objects along streets, curbs, and sidewalks.
Engineering Highlights
Built and trained a YOLOv11 computer vision model using a custom dataset, then integrated the model with OpenCV to create real-time trash identification.
Implemented physical distance and angle estimation for object targeting, coordinated Jetson Nano to Arduino communication for robotic control, and created a robotic arm movement pipeline for autonomous object handling and manipulation.
Developed an obstacle-avoidance system to prevent collisions during autonomous operation, enabling safer navigation while trash collection is in progress.
Designed a navigation system allowing the robot to efficiently traverse an environment, identify nearby trash objects, and coordinate movement paths for optimized collection behavior.